Modelos de Media Móvil, ARMA, y predicción.¶
Repaso:¶
Procesos autorregresivos¶
Recordemos primero la definición de proceso autorregresivo (de media 0):
Definición: un proceso \(\{x_t\}\) es autorregresivo de orden \(p\) si admite la representación
\[ x_t = \phi_1 x_{t-1} + \ldots + \phi_p x_{t-p} + w_t,\]con \(w_t\) ruido blamco de varianza \(\sigma_w^2\).
Autocorrelación y autocorrelación parcial¶
En un proceso autorregresivo puro:
La autocorrelación decae de forma exponencial como función del lag.
La autocorrelación parcial se anula para lags mayores a \(p\).
Proceso de media móvil¶
Definición: un proceso \(\{x_t\}\) es una media móvil de orden \(q\) o \(MA(q)\) si verifica:
\[ x_t = w_t + \theta_1 w_{t-1} + \ldots + \theta_q w_{t-q},\]donde hay \(q\) lags en la media móvil, \(\theta_1,\ldots,\theta_q\) son parámetros, \(\theta_q\neq0\) y \(\{w_t\}\) es ruido blanco (Gaussiano) de varianza \(\sigma^2_w\).
Es el proceso dual del AR, donde el valor actual depende de valores pasados del ruido solamente, y no de la propia serie.
El ruido blanco puede pensarse como una media móvil de orden \(0\).
Si \(q>0\) el proceso es más suave que el ruido puro.
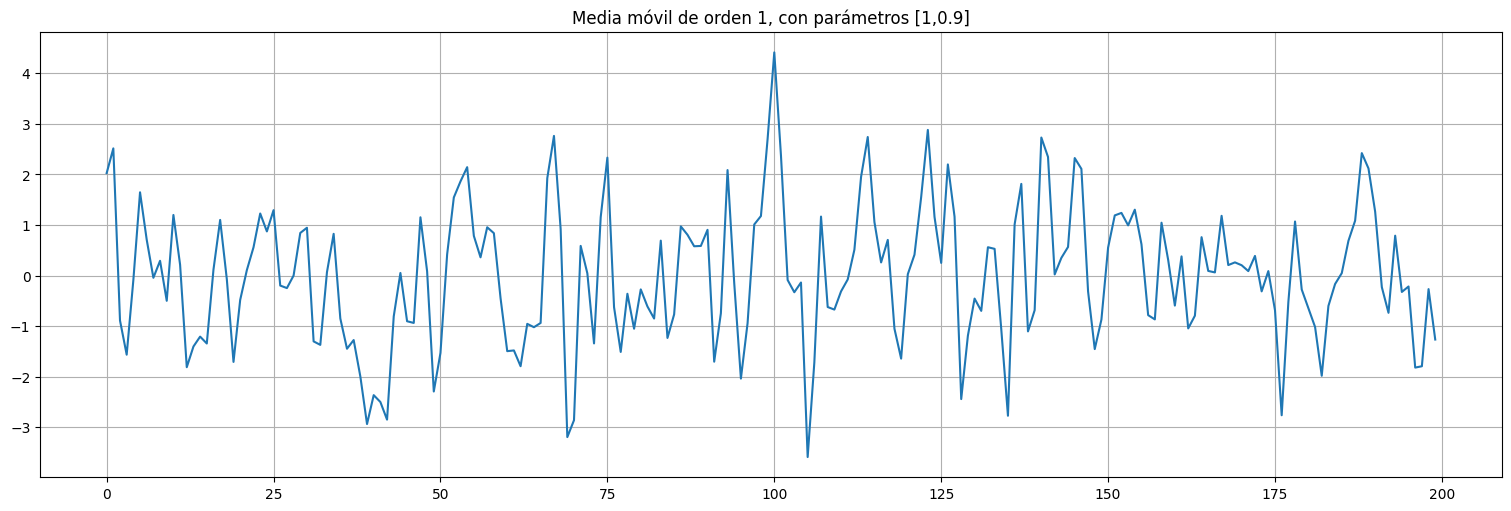
Ejemplo: MA(1)¶
Consideremos el proceso: $\(x_t = w_t + \theta w_{t-1}\)\( con \)w_t\( ruido blanco de varianza \)\sigma_w^2=1\( y \)\theta=0.9$.
## Ejemplo: media movil de orden 1
from statsmodels.tsa.arima_process import arma_generate_sample
theta = 0.9
#primer parámetro: coeficientes autorregresivos. Segundo parámetro: coeficientes de media móvil
#El tercer parámetro es la cantidad de muestras.
x=arma_generate_sample([1],[1,theta],200)
x=pd.Series(x)
x.plot();
plt.title(f"Media móvil de orden 1, con parámetros [1,{theta}]");
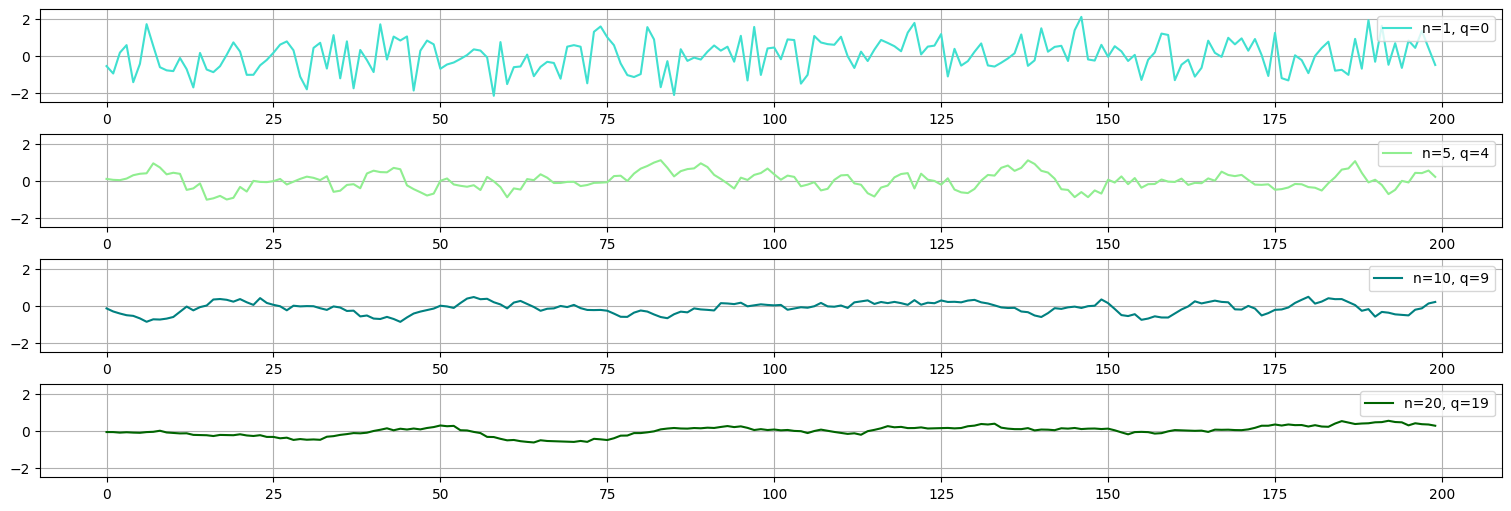
Ejemplo: media móvil de orden variable¶
Consideremos para cada \(n\) el proceso:
con \(w_t\) ruido blanco de varianza \(\sigma^2_w=1\).
Observar que este proceso es una media móvil de orden \(q = n-1\). Lo podemos escribir como:
Esta es la parametrización que le pasamos a arma_generate_sample:
## Ejemplo: media movil de orden variable
j=1
cmap = ['turquoise','lightgreen','teal','darkgreen']
for n in [1,5,10,20]:
q=n-1
x=arma_generate_sample([n],np.ones(n),200)
x=pd.Series(x)
plt.subplot(4,1,j)
plt.plot(x,label=f"n={n}, q={q}", color=cmap[j-1]);
plt.ylim(-2.5,2.5)
plt.legend(loc='upper right');
j=j+1
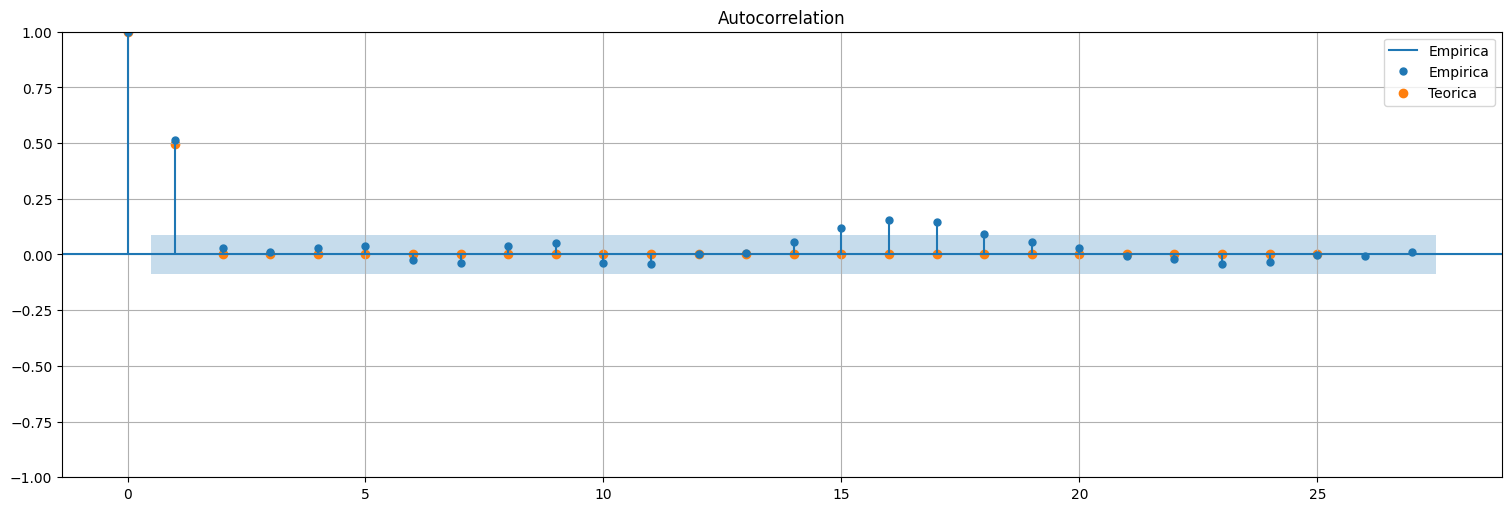
Ejemplo: media movil de orden 1¶
El proceso MA(1) está dado por
Propiedades:
\(E[x_t] = E[w_t] + \theta E[w_{t-1}] = 0\).
\(E[x_t^2] = E[w_t^2] + 2\theta E[w_tw_{t-1}] + \theta^2 E[w_{t-1}^2] = (1+\theta^2)\sigma^2_w.\)
\(E[x_t x_{t-1}] = E[(w_t + \theta w_{t-1})(w_{t-1} + \theta w_{t-2})] = \theta \sigma^2_w.\)
\(E[x_t x_{t-h}] = 0\) si \(h>1\) porque los ruidos que participan no están correlacionados.
Resumiendo, la función de autocovarianza de un MA(1) tiene la forma:
La función de autocorrelación es entonces:
from statsmodels.graphics.tsaplots import plot_acf,plot_pacf
theta=0.9
x=arma_generate_sample([1],[1,theta],500)
x=pd.Series(x)
plot_acf(x,bartlett_confint=False, label="Empirica");
plt.scatter(range(0,26),np.concatenate(([1],[theta/(1+theta**2)], np.zeros(24))), label="Teorica");
plt.legend();
Observación:
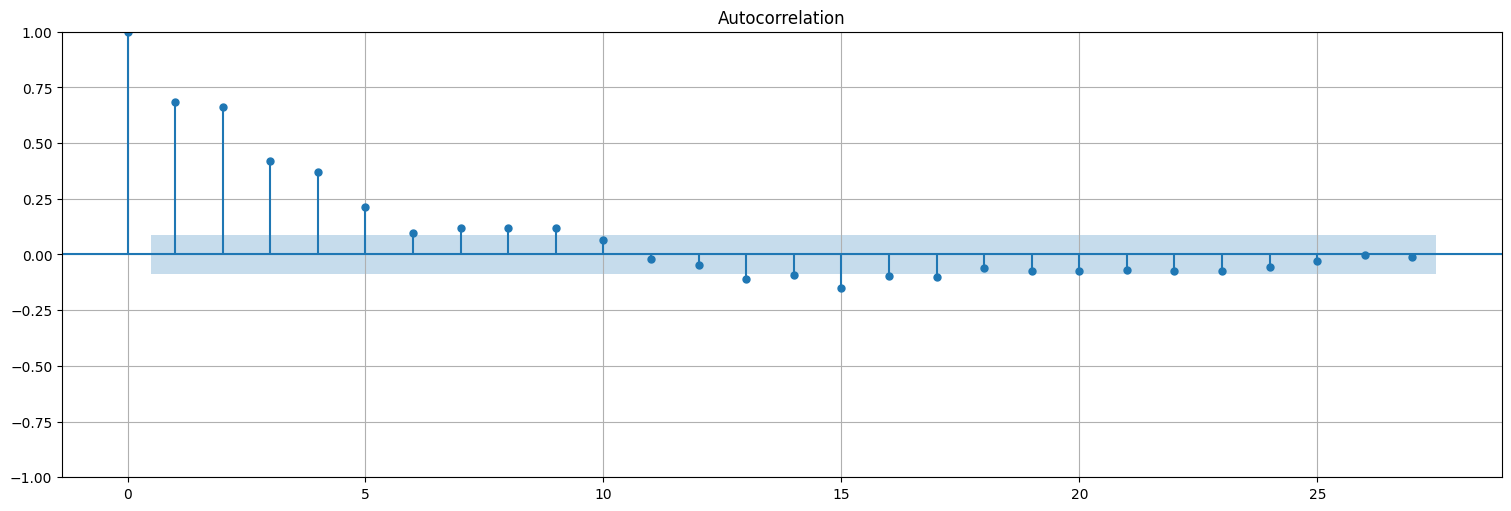
La propiedad anterior es general, es decir, si \(x_t\) es un proceso \(MA(q)\) entonces la ACF de \(x_t\) es \(0\) para lags \(h>q\). Probemos con uno de orden \(q=5\) y coeficientes arbitrarios
x=arma_generate_sample([1],[1,.5,1,.5,1,.5],500)
x=pd.Series(x)
plot_acf(x,bartlett_confint=False);
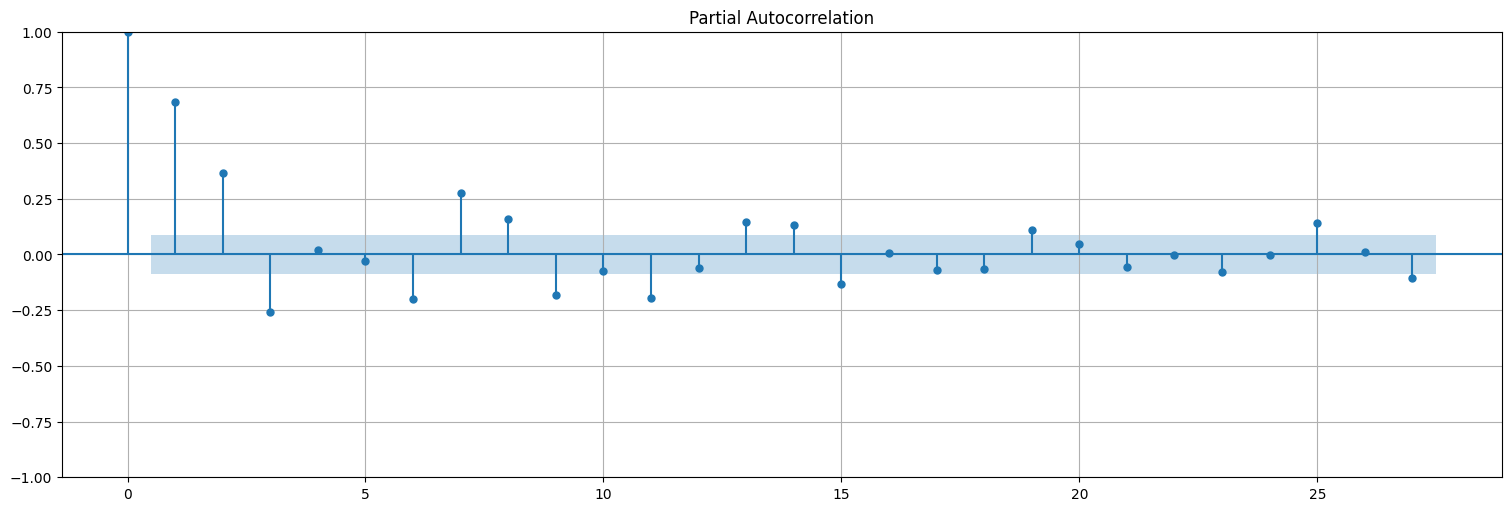
En cambio, la PACF no tiene el mismo comportamiento:
plot_pacf(x);
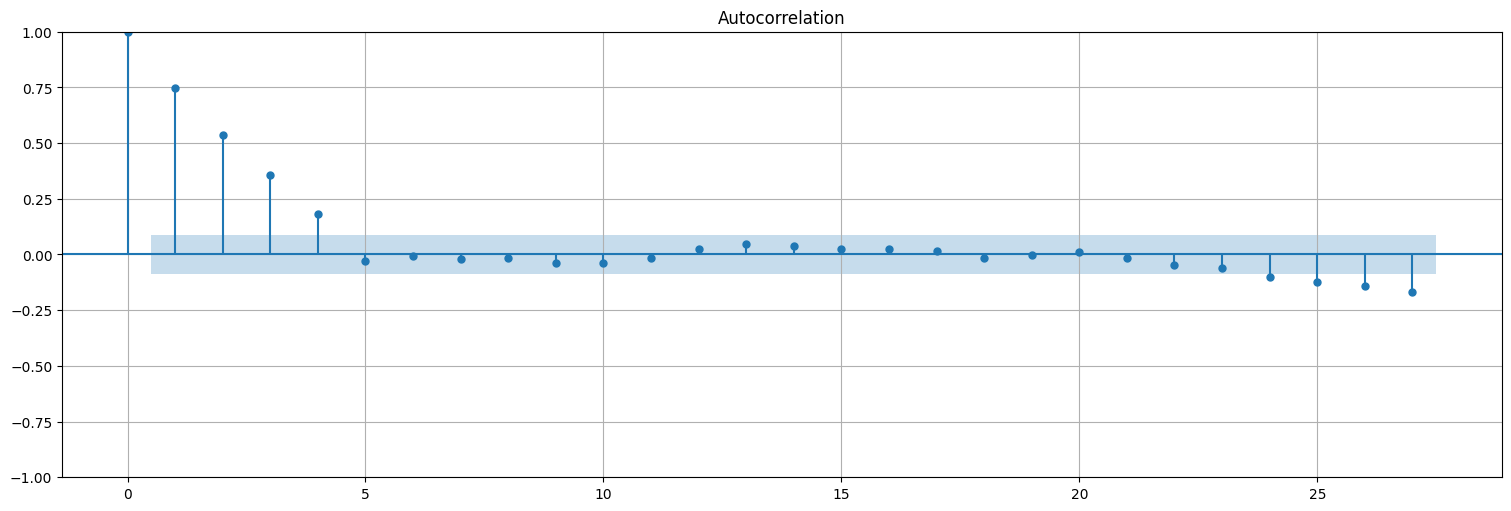
Otro ejemplo:¶
Consideremos la media móvil $\(x_t = \frac{1}{5}\left(w_t + w_{t-1} + w_{t-2} + w_{t-3} + w_{t-4}\right).\)$
n=5
x=arma_generate_sample([n],np.ones(n),500)
x=pd.Series(x)
plot_acf(x, bartlett_confint=False);
plot_pacf(x);
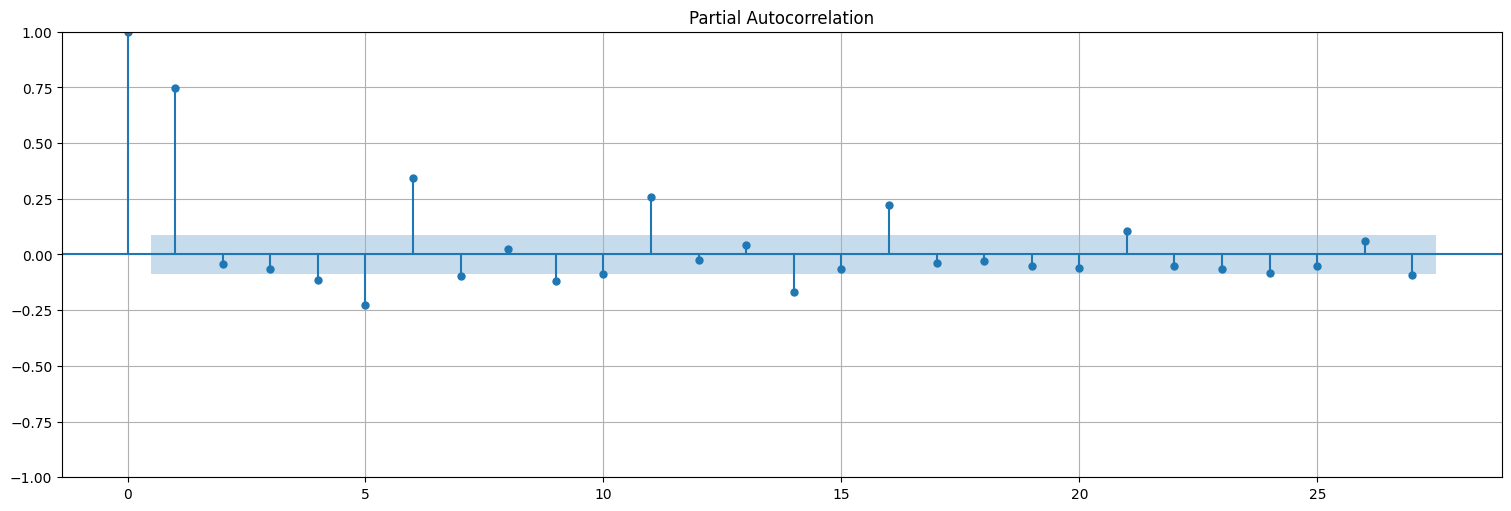
Resumen:¶
En el proceso \(MA(q)\) :
La función de autocorrelación tiene \(q\) lags activos.
La función de autocorrelación parcial decae lentamente
Es decir, a la inversa de lo que ocurre en AR.
Ajuste de un proceso \(MA(q)\)¶
Comencemos por el \(MA(1)\) dado por:
El proceso \(w_t\) no es directamente observable, entonces no podemos hacer una regresión a sus valores anteriores. Deberíamos “despejar” \(w_t\) de algún modo.
Observemos la siguiente recursión:
Siguiendo la recursión, si \(|\theta|<1\) el modelo se dice invertible y podemos escribir:
es decir, convertimos un \(MA(1)\) en un \(AR(\infty)\) en cierto modo. Como \(\theta^j\) es decreciente, podríamos hacer una regresión y tratar de adivinar \(\theta\).
Problema: Es no lineal en \(\theta\) lo que estamos buscando.
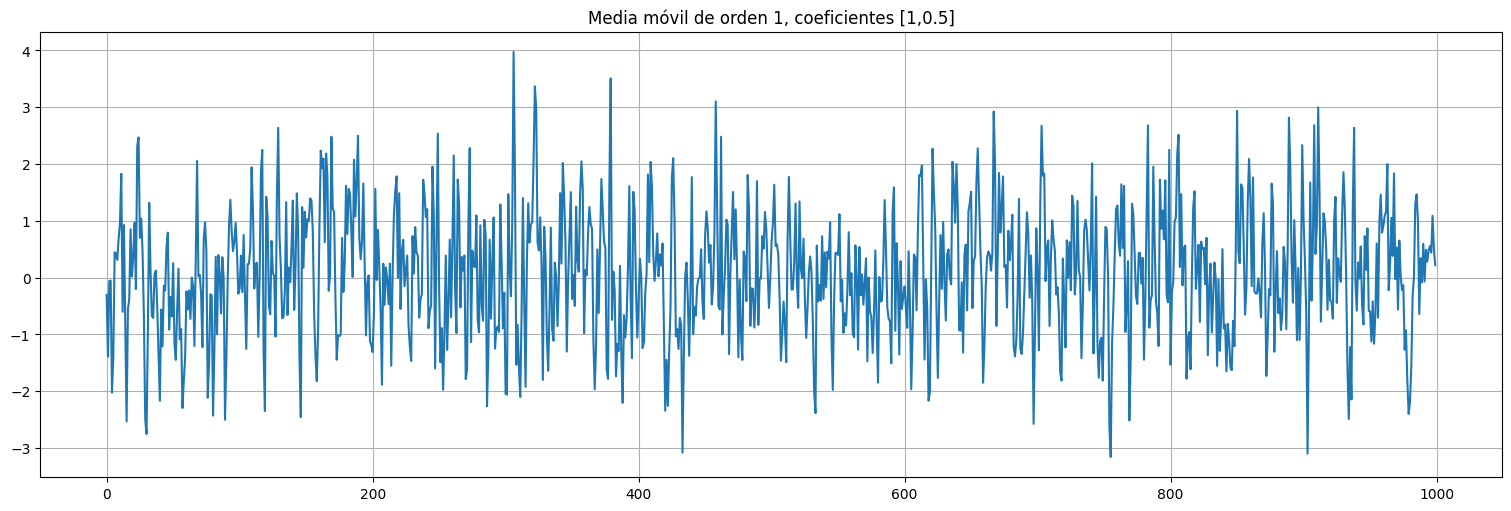
## Ejemplo: simulo un MA(1) con theta = 0.5 y hago varios fits
theta=0.5
x=arma_generate_sample([1],[1,theta],1000)
x=pd.Series(x)
x.plot(title=f"Media móvil de orden 1, coeficientes [1,{theta}]");
from statsmodels.formula.api import ols
data = pd.concat([x, x.shift(1)], axis=1).dropna()
data.columns = ["x", "xL1"]
fit = ols("x ~ 0+xL1", data=data).fit()
print(f"MSE de los residuos: {fit.mse_resid}")
fit.summary()
MSE de los residuos: 1.0609713538139918
| Dep. Variable: | x | R-squared (uncentered): | 0.145 |
|---|---|---|---|
| Model: | OLS | Adj. R-squared (uncentered): | 0.144 |
| Method: | Least Squares | F-statistic: | 168.6 |
| Date: | Mon, 19 May 2025 | Prob (F-statistic): | 9.87e-36 |
| Time: | 16:23:04 | Log-Likelihood: | -1446.6 |
| No. Observations: | 999 | AIC: | 2895. |
| Df Residuals: | 998 | BIC: | 2900. |
| Df Model: | 1 | ||
| Covariance Type: | nonrobust |
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| xL1 | 0.3801 | 0.029 | 12.984 | 0.000 | 0.323 | 0.438 |
| Omnibus: | 0.871 | Durbin-Watson: | 1.891 |
|---|---|---|---|
| Prob(Omnibus): | 0.647 | Jarque-Bera (JB): | 0.951 |
| Skew: | 0.060 | Prob(JB): | 0.622 |
| Kurtosis: | 2.909 | Cond. No. | 1.00 |
Notes:
[1] R² is computed without centering (uncentered) since the model does not contain a constant.
[2] Standard Errors assume that the covariance matrix of the errors is correctly specified.
data = pd.concat([x, x.shift(1), x.shift(2)], axis=1).dropna()
data.columns = ["x", "xL1", "xL2"]
fit = ols("x ~ 0+xL1+xL2", data=data).fit()
print(f"MSE de los residuos: {fit.mse_resid}")
fit.summary()
MSE de los residuos: 1.0398252548742162
| Dep. Variable: | x | R-squared (uncentered): | 0.162 |
|---|---|---|---|
| Model: | OLS | Adj. R-squared (uncentered): | 0.160 |
| Method: | Least Squares | F-statistic: | 96.22 |
| Date: | Mon, 19 May 2025 | Prob (F-statistic): | 6.22e-39 |
| Time: | 16:23:04 | Log-Likelihood: | -1434.6 |
| No. Observations: | 998 | AIC: | 2873. |
| Df Residuals: | 996 | BIC: | 2883. |
| Df Model: | 2 | ||
| Covariance Type: | nonrobust |
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| xL1 | 0.4341 | 0.031 | 13.851 | 0.000 | 0.373 | 0.496 |
| xL2 | -0.1427 | 0.031 | -4.553 | 0.000 | -0.204 | -0.081 |
| Omnibus: | 1.410 | Durbin-Watson: | 1.962 |
|---|---|---|---|
| Prob(Omnibus): | 0.494 | Jarque-Bera (JB): | 1.400 |
| Skew: | 0.030 | Prob(JB): | 0.497 |
| Kurtosis: | 2.826 | Cond. No. | 1.49 |
Notes:
[1] R² is computed without centering (uncentered) since the model does not contain a constant.
[2] Standard Errors assume that the covariance matrix of the errors is correctly specified.
data = pd.concat([x, x.shift(1), x.shift(2), x.shift(3)], axis=1).dropna()
data.columns = ["x", "xL1", "xL2", "xL3"]
fit = ols("x ~ 0+xL1+xL2+xL3", data=data).fit()
print(f"MSE de los residuos: {fit.mse_resid}")
fit.summary()
MSE de los residuos: 1.0243813974085563
| Dep. Variable: | x | R-squared (uncentered): | 0.176 |
|---|---|---|---|
| Model: | OLS | Adj. R-squared (uncentered): | 0.174 |
| Method: | Least Squares | F-statistic: | 70.79 |
| Date: | Mon, 19 May 2025 | Prob (F-statistic): | 1.71e-41 |
| Time: | 16:23:04 | Log-Likelihood: | -1425.2 |
| No. Observations: | 997 | AIC: | 2856. |
| Df Residuals: | 994 | BIC: | 2871. |
| Df Model: | 3 | ||
| Covariance Type: | nonrobust |
| coef | std err | t | P>|t| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| xL1 | 0.4531 | 0.031 | 14.406 | 0.000 | 0.391 | 0.515 |
| xL2 | -0.1987 | 0.034 | -5.848 | 0.000 | -0.265 | -0.132 |
| xL3 | 0.1288 | 0.031 | 4.095 | 0.000 | 0.067 | 0.190 |
| Omnibus: | 2.844 | Durbin-Watson: | 1.982 |
|---|---|---|---|
| Prob(Omnibus): | 0.241 | Jarque-Bera (JB): | 2.494 |
| Skew: | 0.030 | Prob(JB): | 0.287 |
| Kurtosis: | 2.762 | Cond. No. | 1.81 |
Notes:
[1] R² is computed without centering (uncentered) since the model does not contain a constant.
[2] Standard Errors assume that the covariance matrix of the errors is correctly specified.
Problema: el procedimiento anterior no es muy práctico, y si quisiéramos hacer regresión no lineal necesitamos un buen estimador inicial de \(\theta\). Además no generaliza bien a \(q\).
Método de los momentos: es otra idea válida, recordemos la función de autocorrelación del \(MA(1)\).
Si estimamos la correlación de orden uno de los datos (es decir la acf(x) en el lag \(1\)) podemos plantear:
y despejar \(\theta\): $\(\hat{\rho} \theta^2 - \theta + \hat{\rho} = 0.\)$
Es decir: $\(\theta = \frac{1 \pm \sqrt{1-4\hat{\rho}^2}}{2 \hat{\rho}}.\)$
Observación: dos soluciones!! ¿Cuál elijo? ¿Y además qué pasa si da complejo?
Se elije la “invertible”, es decir aquella que da menor a \(1\).
En teoría \(\rho(1)<0.5\) si \(\theta<1\) entonces no puede dar complejo. Pero al estimar \(\rho\) por \(\hat{\rho}\) puede ocurrir.
Para estimar \(\sigma^2_w\), la varianza del ruido, podemos usar que \(\sigma^2_x = (1+\theta^2)\sigma^2_w\) y usar el valor de \(\theta\) estimado.
#### Ejemplo
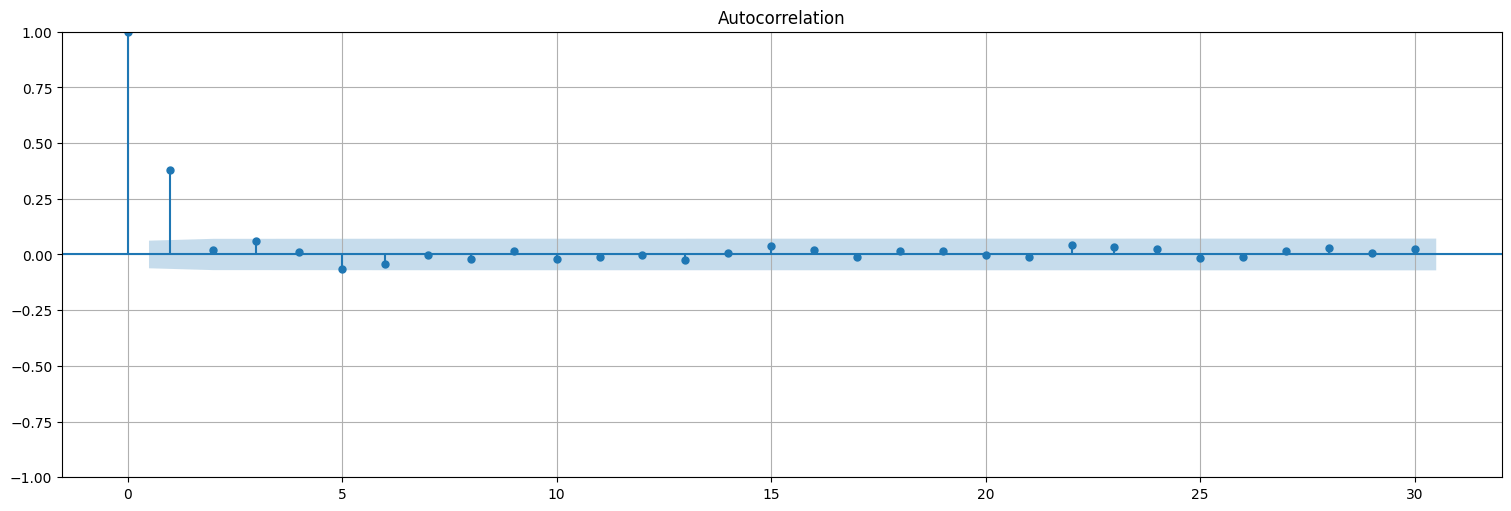
from statsmodels.tsa.api import acf
plot_acf(x)
rho = acf(x)[1]
theta = (1-np.sqrt(1-4*rho**2))/(2*rho)
print(f"Autocorrelación estimada a lag 1: ρ(1)={rho}")
print(f"Ajuste por método de los momentos: θ={theta}")
Autocorrelación estimada a lag 1: ρ(1)=0.3776200114621945
Ajuste por método de los momentos: θ=0.4562147976238853
# Estimo la varianza del ruido por método de los momentos despejando (debería dar 1 en este caso).
sigma_w2 = np.var(x)/(1+theta**2)
print(f"Varianza estimada de wt: {sigma_w2}")
Varianza estimada de wt: 1.0204510256747432
El método de los momentos se puede generalizar a mayor orden, y también se puede utilizar en el caso \(AR(p)\) (donde se denominan Ecuaciones de Yule-Walker).
Sin embargo, en la práctica, estos estimadores no son los más eficientes. En general, si los ruidos son gaussianos, conviene usar un enfoque de máxima verosimilitud. Este es el método que utiliza la biblioteca
statsmodelsdepython.Discutiremos más este método en relación al modelo completo ARMA, pero a modo de adelanto, hagamos el fit de este último modelo por máxima verosimilitud.
# Ejemplo
from statsmodels.tsa.api import ARIMA
#La funcion ARIMA permite ajustar modelos autorregresivos integrados y de media móvil.
#En este caso solo usamos el coeficiente de media móvil.
#El parámetro trend="n" es porque el proceso ya está centrado (le sacamos el intercept)
fit = ARIMA(x,order=(0,0,1), trend="n").fit()
fit.summary()
| Dep. Variable: | y | No. Observations: | 1000 |
|---|---|---|---|
| Model: | ARIMA(0, 0, 1) | Log Likelihood | -1429.552 |
| Date: | Mon, 19 May 2025 | AIC | 2863.104 |
| Time: | 16:23:04 | BIC | 2872.920 |
| Sample: | 0 | HQIC | 2866.835 |
| - 1000 | |||
| Covariance Type: | opg |
| coef | std err | z | P>|z| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| ma.L1 | 0.4676 | 0.028 | 16.444 | 0.000 | 0.412 | 0.523 |
| sigma2 | 1.0212 | 0.049 | 21.008 | 0.000 | 0.926 | 1.116 |
| Ljung-Box (L1) (Q): | 0.09 | Jarque-Bera (JB): | 2.33 |
|---|---|---|---|
| Prob(Q): | 0.77 | Prob(JB): | 0.31 |
| Heteroskedasticity (H): | 0.94 | Skew: | 0.04 |
| Prob(H) (two-sided): | 0.59 | Kurtosis: | 2.78 |
Warnings:
[1] Covariance matrix calculated using the outer product of gradients (complex-step).
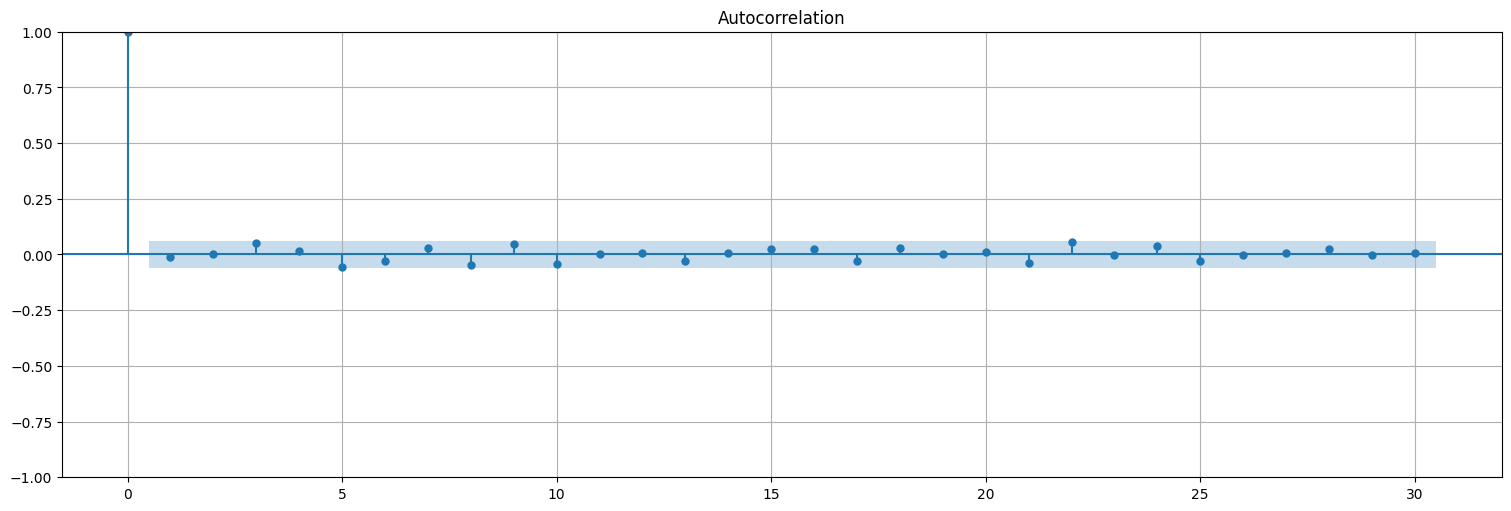
Podemos ver que la autocorrelación de los residuos se asemeja al ruido blanco:
res = fit.resid
plot_acf(res, bartlett_confint=False);
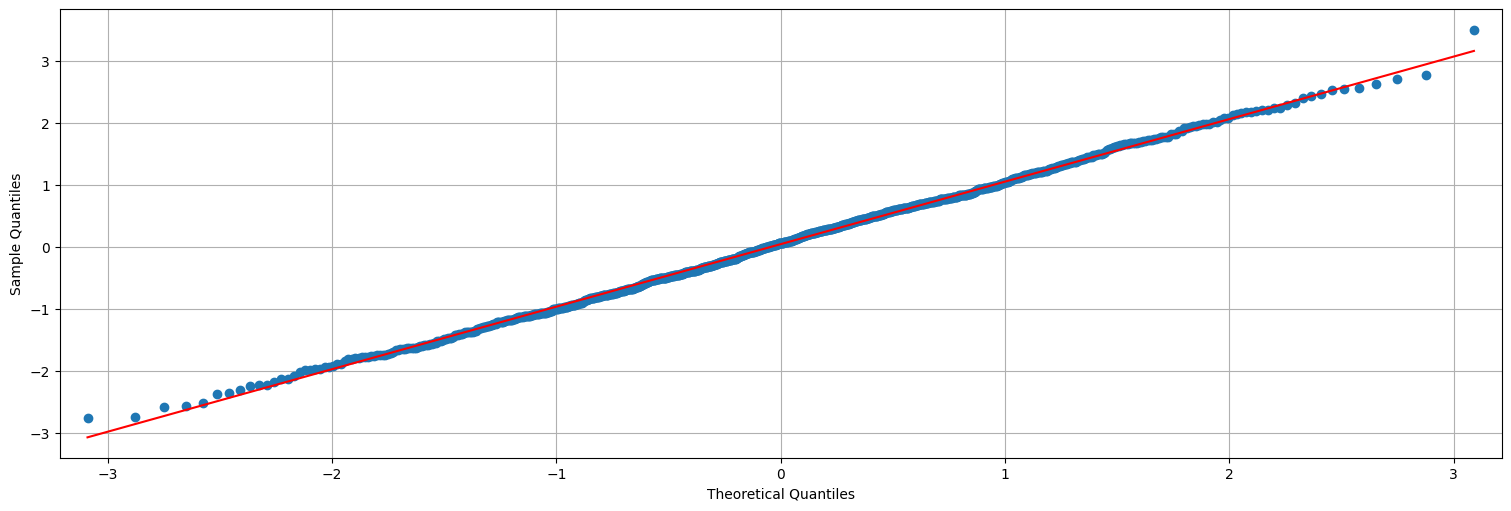
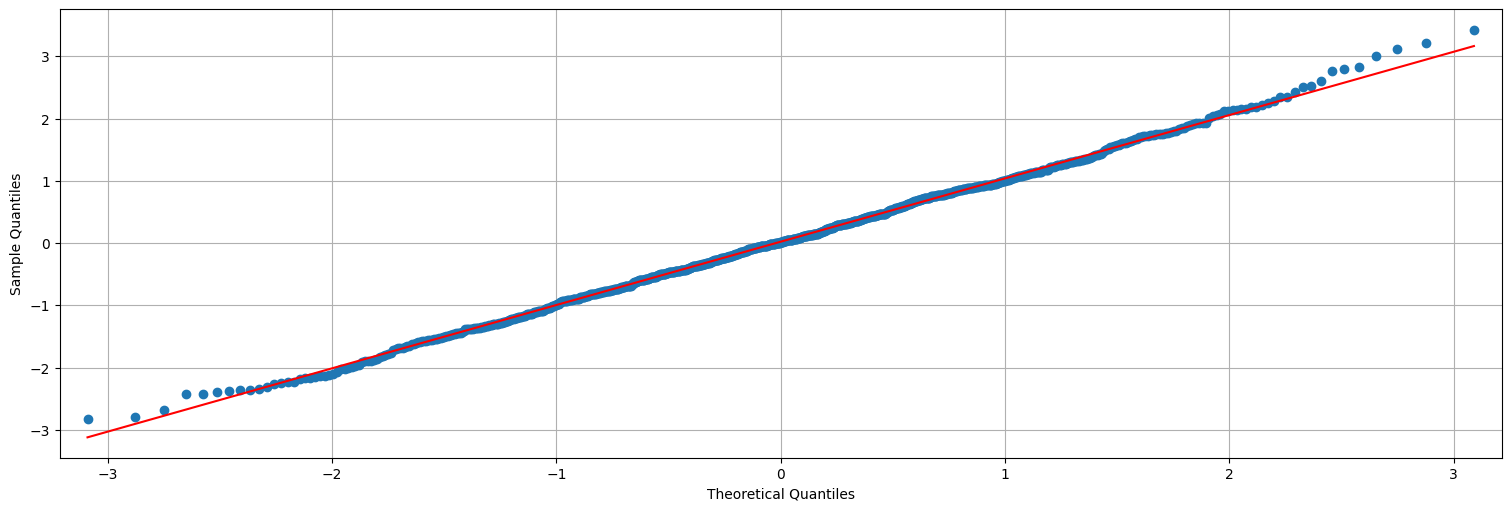
Y que los residuos son aproximadamente Gaussianos:
from statsmodels.graphics.api import qqplot
qqplot(res,line="s");
Modelos ARMA¶
Un modelo \(ARMA(p,q)\) es simplemente la combinación de los dos modelos vistos anteriormente. En términos matemáticos, \(x_t\) es un modelo ARMA si se verifica:
con \(\phi_p\) y \(\theta_q\) distintos de \(0\). Los coeficientes \(\phi_j\) son los coeficientes de la parte autorregresiva, y los \(\theta_j\) los de la parte media móvil. Como siempre, \(w_t\) es ruido blanco (gaussiano) de varianza \(\sigma^2_w\).
Notación alternativa¶
Recordemos que podemos reescribir la ecuación anterior como:
O bien:
Identificando \(a_0=1\), \(a_i = -\phi_i\), \(b_0=1\) y \(b_j = \theta_j\). Esta es la parametrización estándar en python.statsmodels.
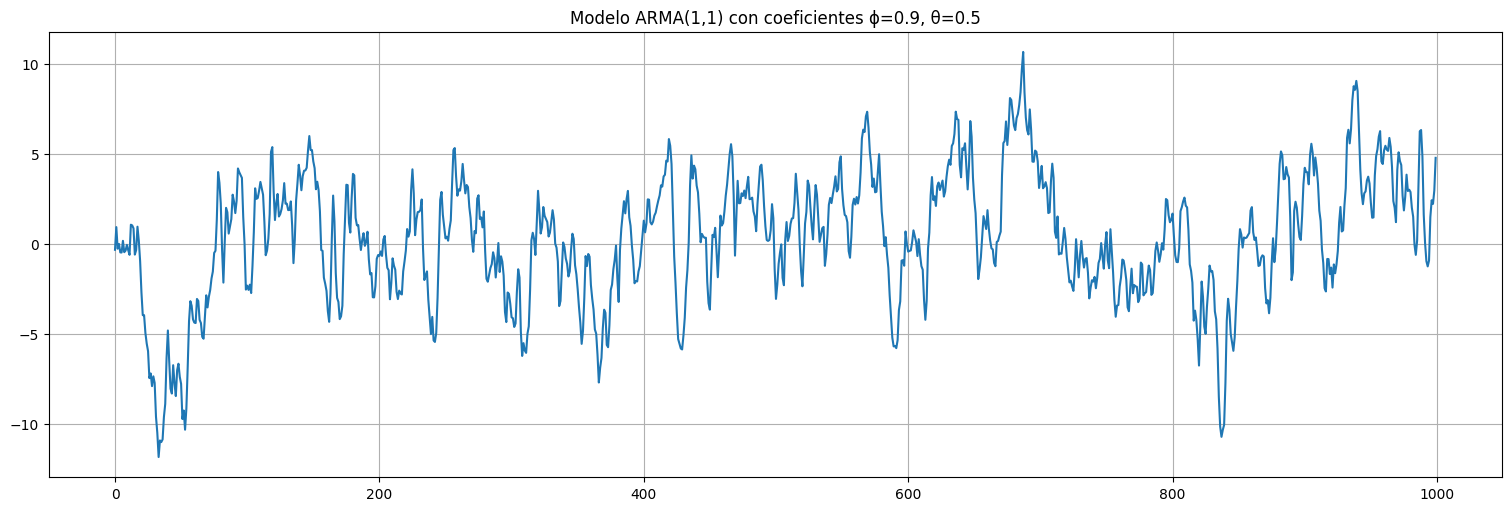
Ejemplo: ARMA(1,1)¶
Consideremos el siguiente proceso:
o bien
## Ejemplo: ARMA(1,1)
phi=0.9
theta=0.5
x=arma_generate_sample([1,-phi],[1,theta],1000)
x=pd.Series(x)
x.plot(title=f"Modelo ARMA(1,1) con coeficientes ϕ={phi}, θ={theta}");
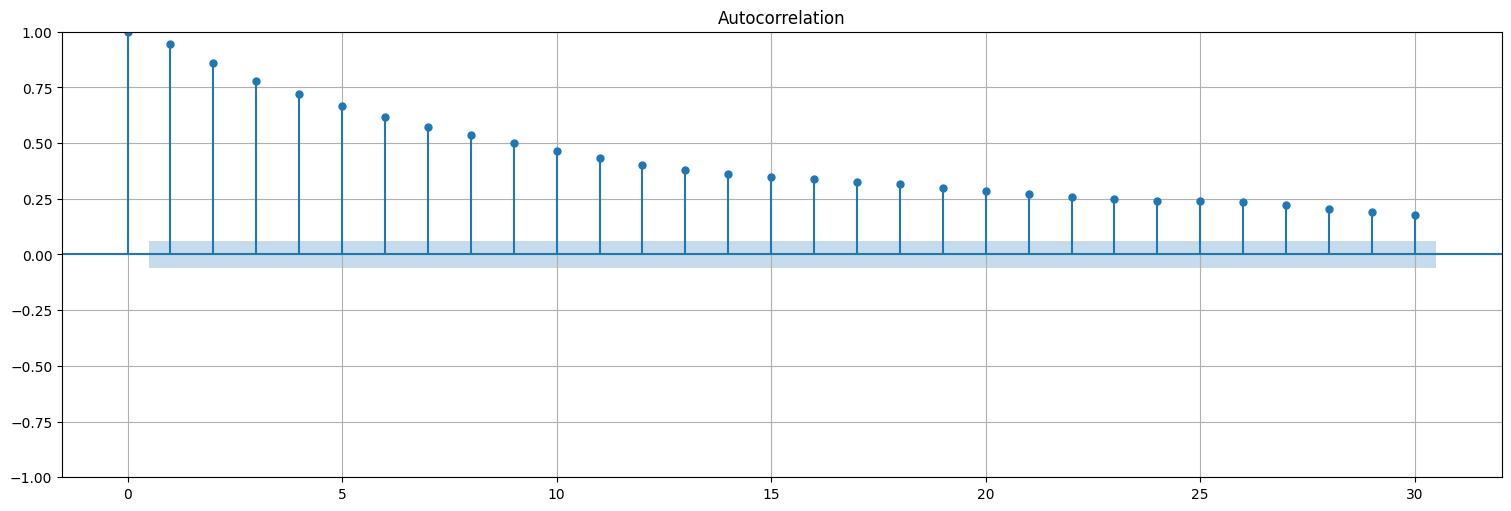
plot_acf(x,bartlett_confint=False);
plot_pacf(x);
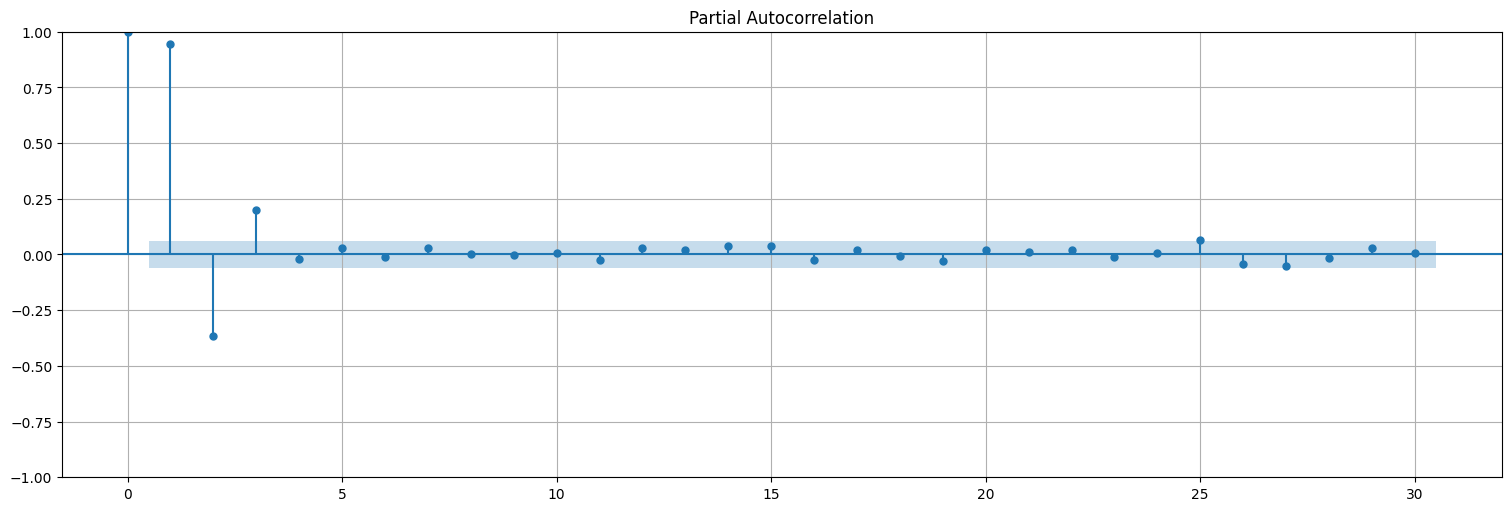
Problema: Ahora la ACF y PACF no son tan claros estimadores del orden del modelo!!
En general, para un modelo ARMA(p,q) tanto las ACF como la PACF decaen a 0 exponencialmente.
Aquí no queda otra que “probar” el orden y cortar en base a algún criterio tipo el AIC o BIC.
Ajuste de un modelo ARMA(1,1)¶
fit = ARIMA(x,order=(1,0,1), trend="n").fit()
fit.summary()
| Dep. Variable: | y | No. Observations: | 1000 |
|---|---|---|---|
| Model: | ARIMA(1, 0, 1) | Log Likelihood | -1437.233 |
| Date: | Mon, 19 May 2025 | AIC | 2880.466 |
| Time: | 16:23:04 | BIC | 2895.189 |
| Sample: | 0 | HQIC | 2886.062 |
| - 1000 | |||
| Covariance Type: | opg |
| coef | std err | z | P>|z| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| ar.L1 | 0.9077 | 0.013 | 67.711 | 0.000 | 0.881 | 0.934 |
| ma.L1 | 0.4810 | 0.029 | 16.499 | 0.000 | 0.424 | 0.538 |
| sigma2 | 1.0344 | 0.046 | 22.353 | 0.000 | 0.944 | 1.125 |
| Ljung-Box (L1) (Q): | 0.03 | Jarque-Bera (JB): | 0.58 |
|---|---|---|---|
| Prob(Q): | 0.87 | Prob(JB): | 0.75 |
| Heteroskedasticity (H): | 0.93 | Skew: | 0.06 |
| Prob(H) (two-sided): | 0.54 | Kurtosis: | 2.99 |
Warnings:
[1] Covariance matrix calculated using the outer product of gradients (complex-step).
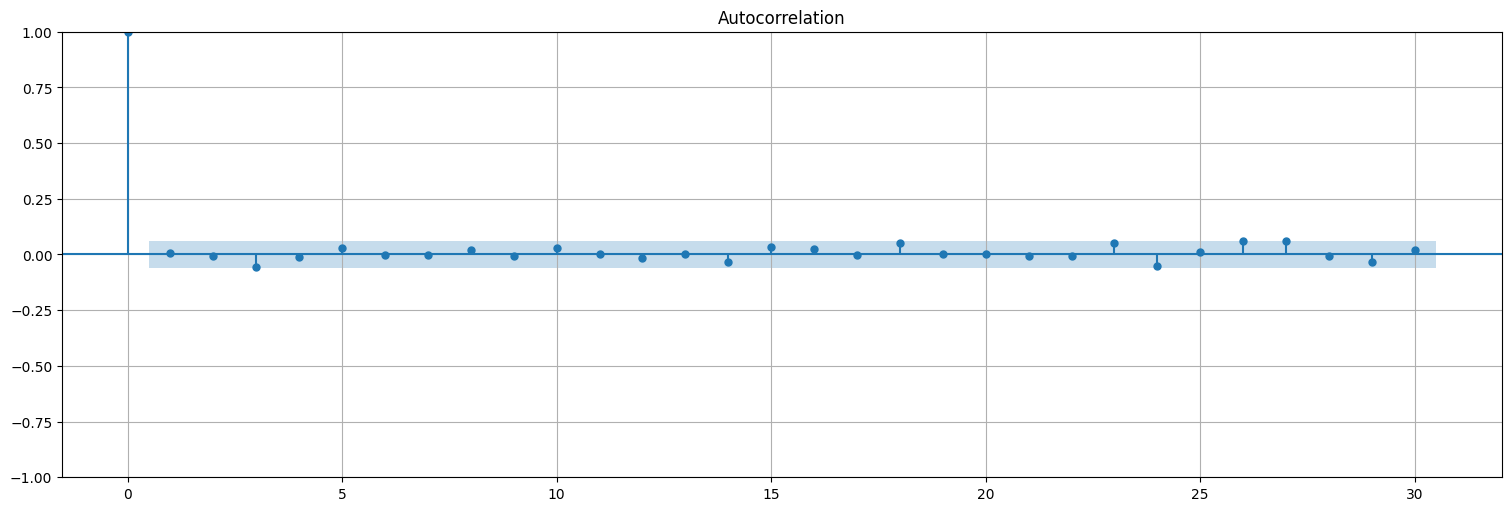
Podemos ver que la autocorrelación de los residuos se asemeja al ruido blanco:
res = fit.resid
plot_acf(res, bartlett_confint=False);
Y que los residuos son aproximadamente Gaussianos:
from statsmodels.graphics.api import qqplot
qqplot(res,line="s");
Causalidad, invertibilidad.¶
Observación: No todos los juegos de parámetros \(\phi_j\), \(\theta_j\) son posibles. Algunos juegos de parámetros pueden producir procesos no estacionarios, o con parámetros no bien definidos.
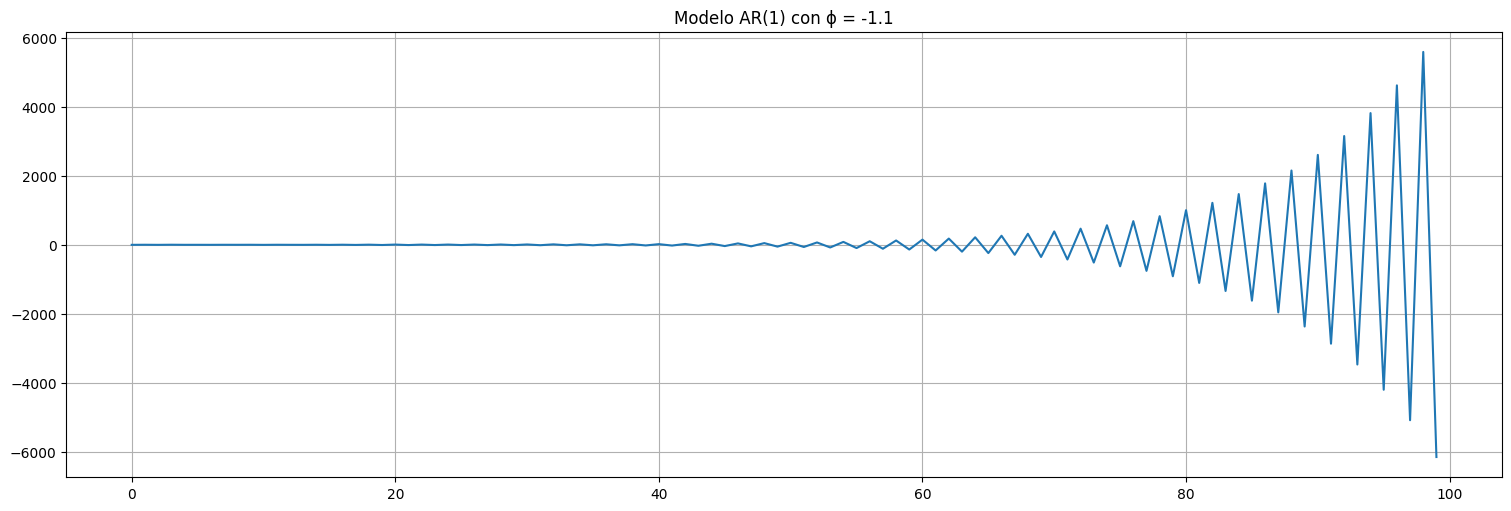
Ejemplo: Consideremos un proceso \(AR(1)\) con \(|\phi_1| > 1\), se tiene que:
Este proceso amplifica el valor de la muestra anterior. Eventualmente explota!
# AR con explosion
phi=-1.1
x=arma_generate_sample([1,-phi],[1],100)
x=pd.Series(x)
x.plot()
plt.title(f"Modelo AR(1) con ϕ = {phi}");
Polinomios del AR y MA:¶
Se definen los siguiente polinomios, asociados a los coeficientes de la parte AR y MA:
Causalidad:¶
Un proceso ARMA es causal si se puede escribir solo como función de las innovaciones pasadas:
con coeficientes \(\psi\) a determinar y \(\sum_{j=0}^\infty |\psi_j| <\infty\).
Teorema: Un proceso ARMA(p,q) es causal (no explosivo) si y solo si las raíces del polinomio \(\phi(z)\) están todas fuera del círculo unitario (es decir, |z|>1 en toda raíz).
Ejemplo: Si \(x_t\) es un AR(1), entonces \(\phi(z) = 1-\phi_1 z\), y la raíz está fuera de \([-1,1]\) si y solo si \(|\phi_1|<1\).
Invertibilidad:¶
Un proceso ARMA es invertible si se puede “despejar” \(w_t\) de los valores pasados del proceso:
con coeficientes \(\pi\) a determinar y \(\sum_{j=0}^\infty |\pi_j| <\infty\).
Teorema: Un proceso ARMA(p,q) es invertible si y solo si las raíces del polinomio \(\theta(z)\) están todas fuera del círculo unitario (es decir, |z|>1 en toda raíz).
## Ejemplos
from statsmodels.tsa.api import ArmaProcess
print("Ejemplo 1: AR(1) inestable")
proc = ArmaProcess.from_coeffs(-1.1,0)
print(proc)
print(f"Es estacionario? -> {proc.isstationary}")
print("Ejemplo 2: ARMA(1,1) como antes")
proc = ArmaProcess.from_coeffs(.9,.5)
print(proc)
print(f"Es estacionario? -> {proc.isstationary}")
print(f"Es invertible? -> {proc.isinvertible}")
Ejemplo 1: AR(1) inestable
ArmaProcess
AR: [1.0, 1.1]
MA: [1.0, 0.0]
Es estacionario? -> False
Ejemplo 2: ARMA(1,1) como antes
ArmaProcess
AR: [1.0, -0.9]
MA: [1.0, 0.5]
Es estacionario? -> True
Es invertible? -> True
Parámetros del ajuste de un modelo ARMA¶
El ajuste se realiza entonces mediante máxima verosimilitud o métodos de los momentos, buscando siempre un modelo causal e invertible.
Predicción en modelos ARMA¶
Idea: dado un modelo ARMA(p,q) de parámetros \(\phi_1,\ldots,\phi_p\) y \(\theta_1,\ldots,\theta_q\), y posiblemente una media \(\mu\), es decir un proceso:
donde \(w_t\) es ruido blanco Gaussiano de varianza \(\sigma_w^2\).
Pregunta:
¿Cuál es la mejor predicción que uno puede hacer de \(x_{t+n}\) conociendo los valores del proceso \(x_0,\ldots,x_t\) y los parámetros?
El caso AR(p)¶
Supongamos \(\mu=0\) (en otro caso, simplemente centramos por la media). Este caso ya lo discutimos, si conocemos el proceso hasta tiempo \(n\), entonces sabemos que:
El mejor predictor \(\hat{x}_{n+1}^n\) en términos de error cuadrático medio es un predictor lineal:
que debe satisfacer las ecuaciones de predicción:
es decir, el error de predicción no debe estar correlacionado con ninguna de las muestras anteriores (extrajimos “toda la información”).
Notemos que es muy fácil resolver esto en el caso del \(AR(p)\) ya que tomando como predicción:
se tiene que \(x_{n+1} - \hat{x}^n_{n+1} = w_{n+1}\) que sabemos no está correlacionado con ninguna muestra anterior!
Es decir, simplemente propagando la recursión como si el ruido fuera \(0\) obtenemos la mejor predicción (hay que demostrar esto para \(n+2\), \(n+3\), etc.)
El caso ARMA(p,q)¶
En el caso general no resulta tan sencillo resolver las ecuaciones de predicción, y debemos usar toda la historia del proceso. Consideremos el caso de predicción a un paso:
Construyo un estimador:
siendo \(x=(x_1,\ldots,x_n)\) el vector con todos los valores anteriores.
Planteando la ecuación de predicción queda:
Haciendo la distributiva queda:
Identificando las covarianzas nos queda el siguiente sistema de ecuaciones:
Lo anterior es un sistema de ecuaciones de la forma:
Resolviendo el sistema salen los coeficientes.
Nota: debemos tener calculadas las covarianzas del modelo!
También se puede calcular la varianza del error de predicción para hacer intervalos de confianza, y queda:
Problema¶
La ecuación anterior solo explica como calcular “el paso siguiente” y aún así es muy difícil de resolver si el conjunto de datos es grande (sistema lineal grande). Afortunadamente ambos incovenientes se pueden levantar usando métodos recursivos:
Algoritmo de Durbin-Levinson.
Algoritmo de innovaciones.
Estos son los algoritmos que usan las bibliotecas de python para predecir. En particular, calculan:
El mejor predictor lineal \(\hat{x}_{n+m}^n\) \(m\) muestras adelante.
La varianza \(P^n_{n+m}\) del error, lo que permite construir intervaos de confianza.
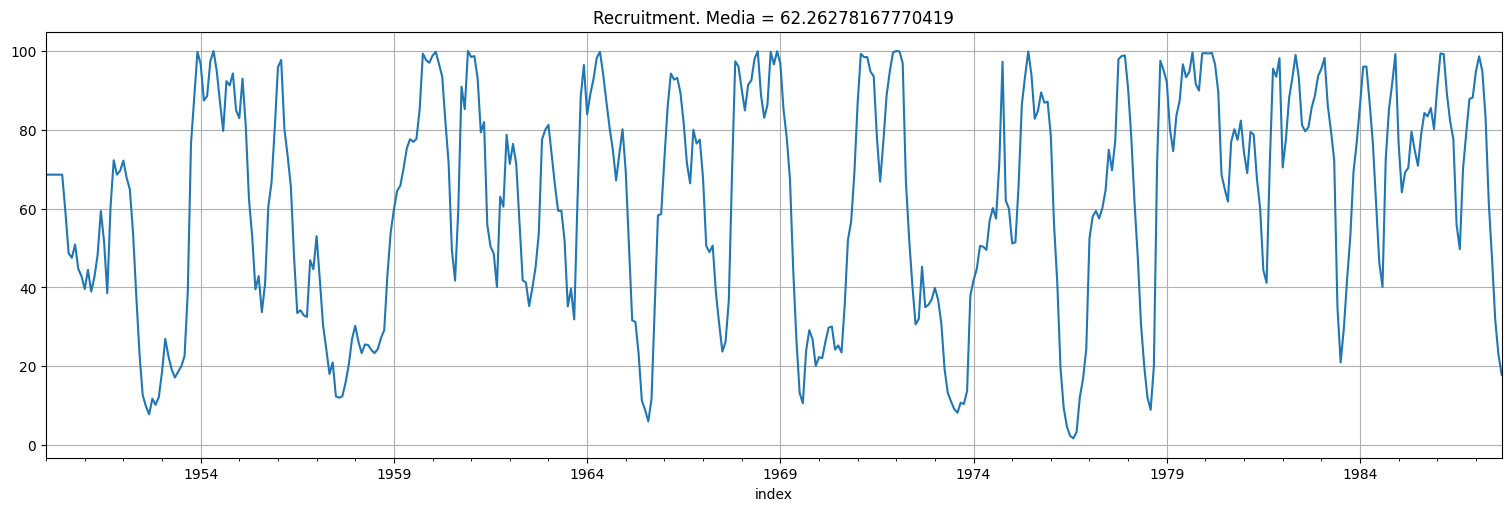
Ejemplo: la serie de Recruitment¶
rec=pd.Series(astsa.rec["value"])
rec.plot()
plt.title(f"Recruitment. Media = {np.mean(rec)}");
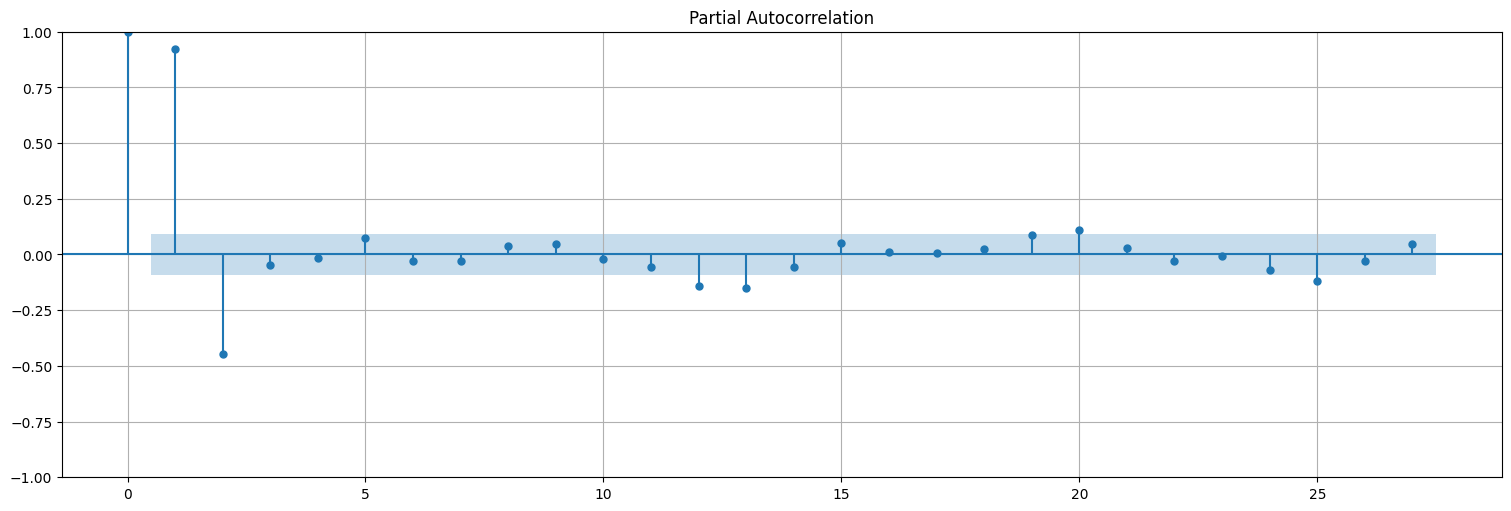
plot_pacf(rec);
#Usamos la función de statsmodels para ajustar.
#trend="c" nos permite incorporar una tendencia constante (media) al fit.
from statsmodels.tsa.api import ARIMA
fit = ARIMA(rec,order=(2,0,0), trend="c").fit()
fit.summary()
| Dep. Variable: | value | No. Observations: | 453 |
|---|---|---|---|
| Model: | ARIMA(2, 0, 0) | Log Likelihood | -1661.510 |
| Date: | Mon, 19 May 2025 | AIC | 3331.019 |
| Time: | 16:23:05 | BIC | 3347.483 |
| Sample: | 01-31-1950 | HQIC | 3337.506 |
| - 09-30-1987 | |||
| Covariance Type: | opg |
| coef | std err | z | P>|z| | [0.025 | 0.975] | |
|---|---|---|---|---|---|---|
| const | 61.8939 | 4.123 | 15.013 | 0.000 | 53.814 | 69.974 |
| ar.L1 | 1.3512 | 0.041 | 32.952 | 0.000 | 1.271 | 1.432 |
| ar.L2 | -0.4612 | 0.037 | -12.398 | 0.000 | -0.534 | -0.388 |
| sigma2 | 89.3353 | 5.128 | 17.420 | 0.000 | 79.284 | 99.387 |
| Ljung-Box (L1) (Q): | 0.12 | Jarque-Bera (JB): | 93.63 |
|---|---|---|---|
| Prob(Q): | 0.72 | Prob(JB): | 0.00 |
| Heteroskedasticity (H): | 1.25 | Skew: | 0.30 |
| Prob(H) (two-sided): | 0.17 | Kurtosis: | 5.15 |
Warnings:
[1] Covariance matrix calculated using the outer product of gradients (complex-step).
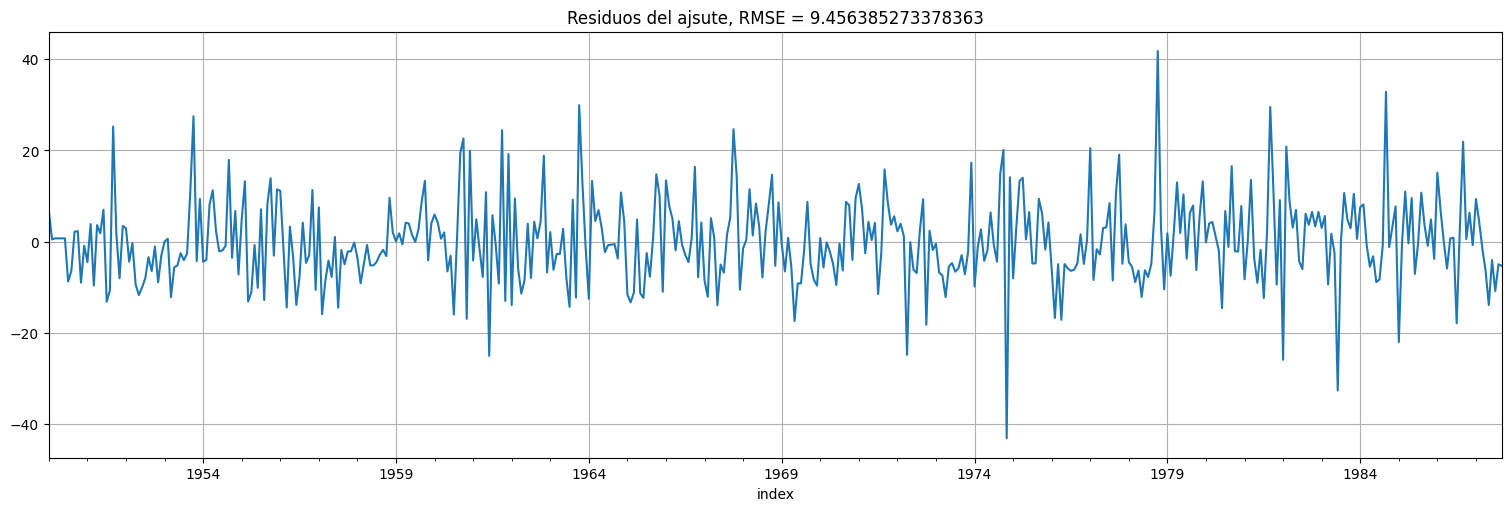
fit.resid.plot()
plt.title(f"Residuos del ajsute, RMSE = {np.sqrt(fit.mse)}");
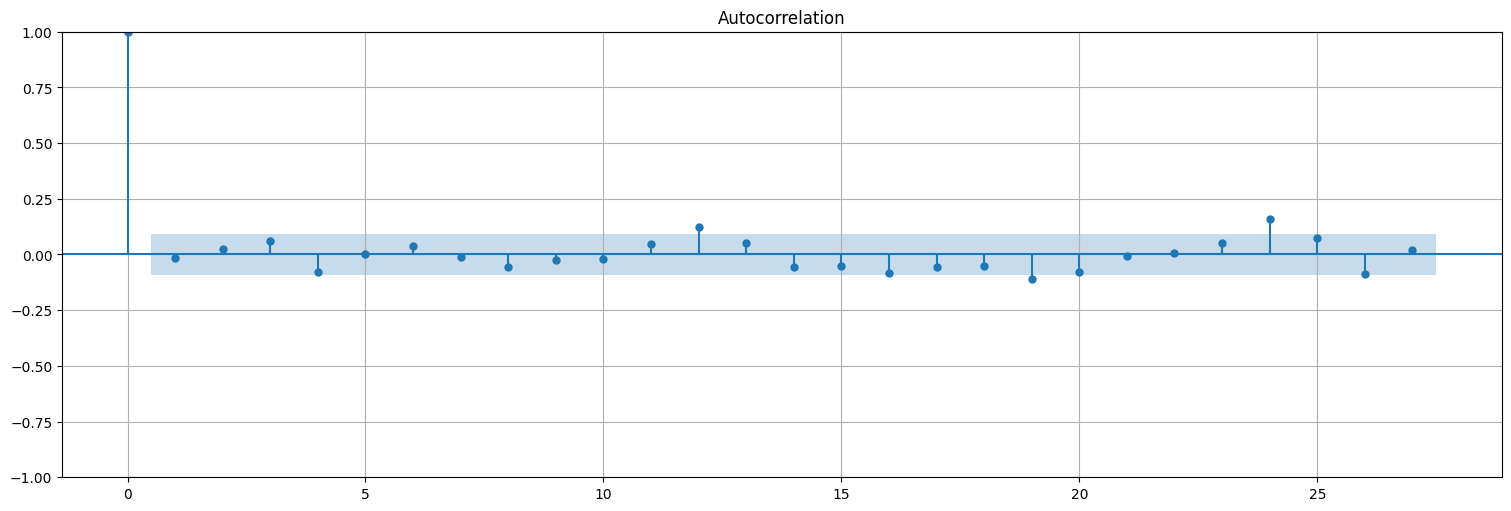
Podemos ver que la autocorrelación de los residuos se asemeja al ruido blanco:
res = fit.resid
plot_acf(res, bartlett_confint=False);
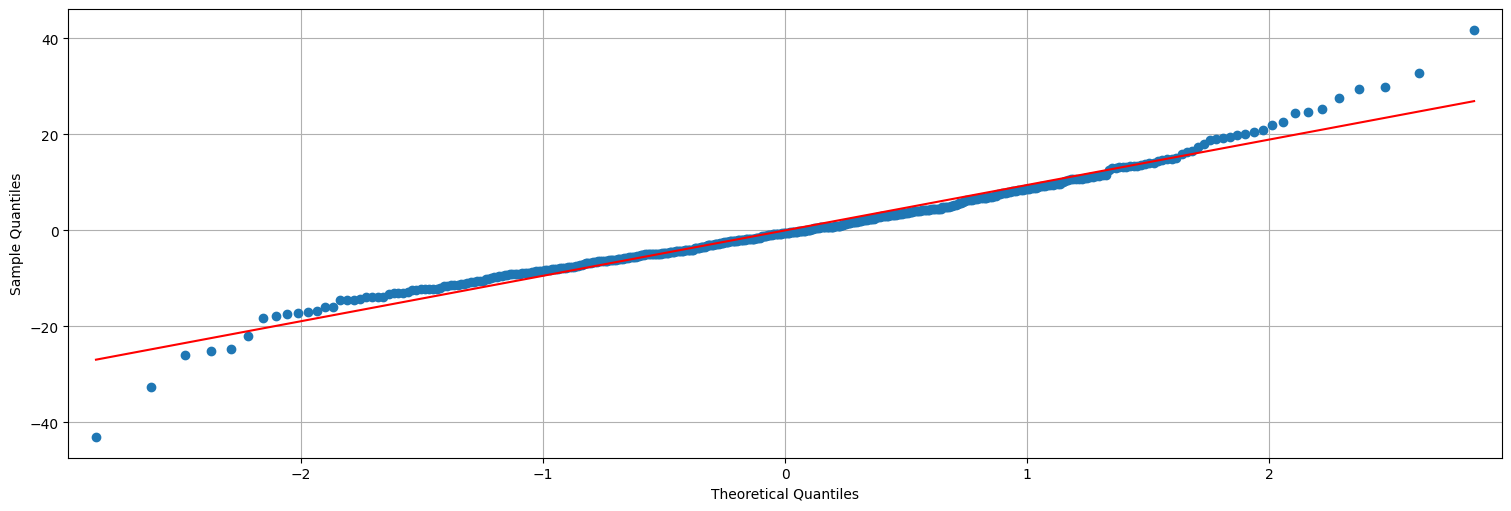
Y que los residuos son aproximadamente Gaussianos, pero ya no del todo. Tienen algunos outliers…
from statsmodels.graphics.api import qqplot
qqplot(res,line="s");
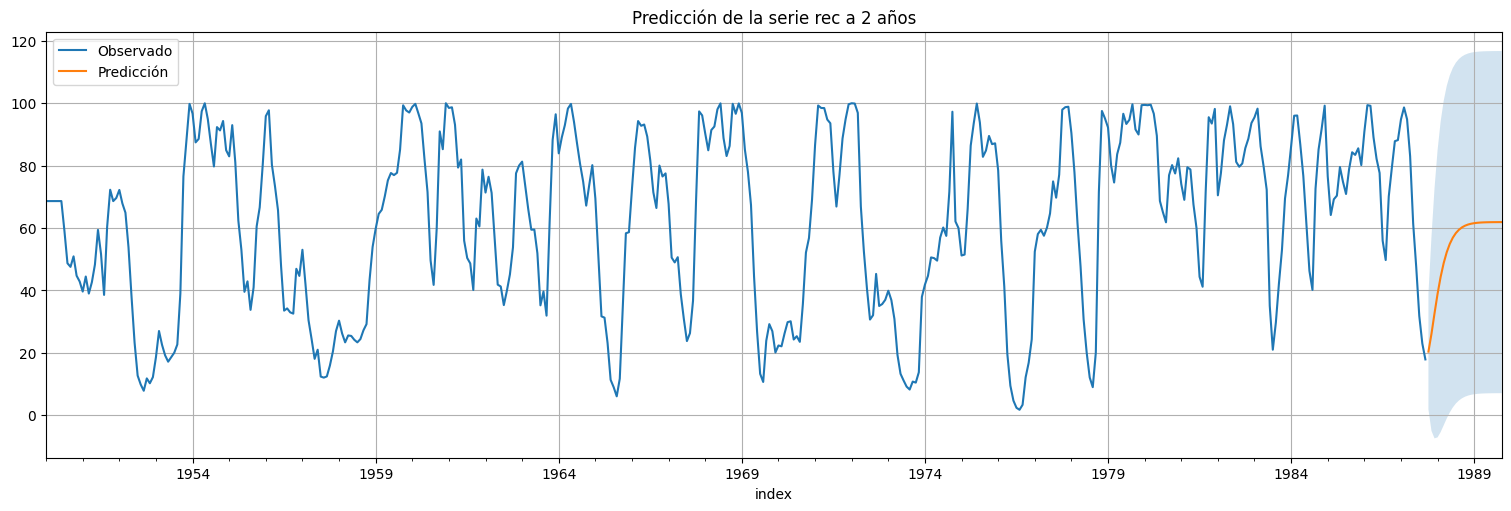
Predicción a futuro¶
Ahora que tenemos el modelo ajustado, ¿cómo podemos agregar nuevas predicciones usando los algoritmos mencionados?
#Usamos el modelo ajustado para predecir a futuro
h = 24 #horizonte de predicción
predicciones = fit.get_prediction(start=rec.size,end=rec.size+h)
xhat = predicciones.predicted_mean
confint = predicciones.conf_int(alpha=0.05) #alpha es la confianza del intervalo
rec.plot()
xhat.plot()
plt.legend(["Observado","Predicción"])
plt.fill_between(xhat.index,confint["lower value"], confint["upper value"], alpha=0.2);
plt.title("Predicción de la serie rec a 2 años");
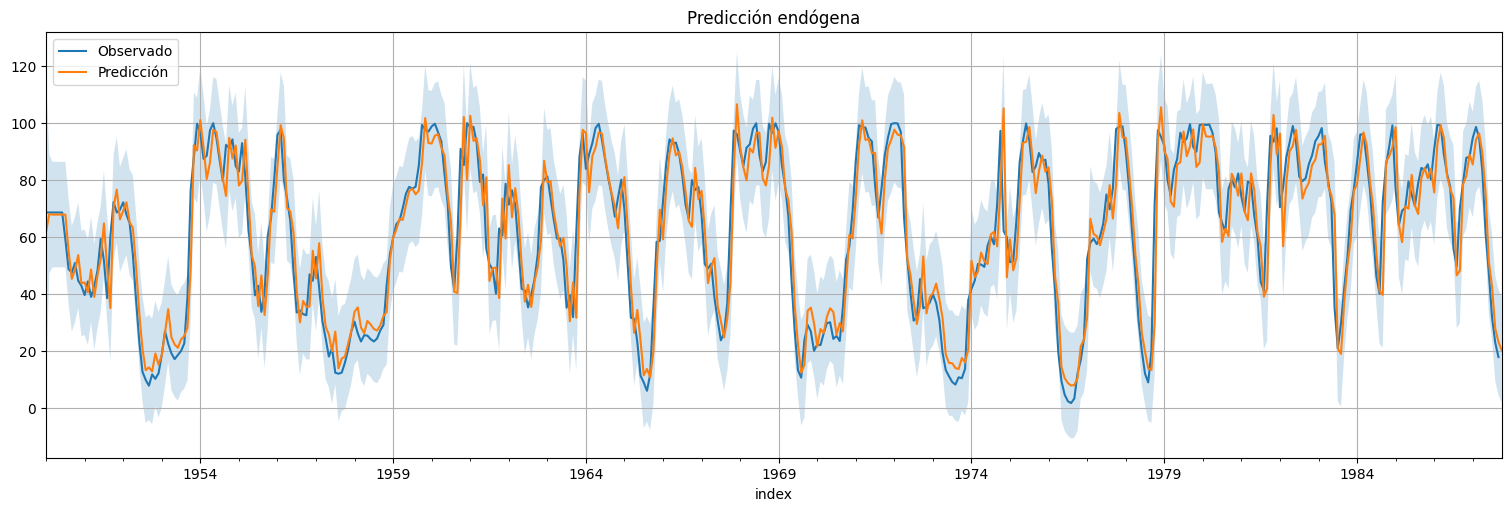
Predicción endógena de la serie¶
#Usamos el modelo ajustado para predecir los propios valores de la serie.
predicciones = fit.get_prediction(start=0,end=rec.size)
xhat = predicciones.predicted_mean
confint = predicciones.conf_int(alpha=0.05) #alpha es la confianza del intervalo
rec.plot()
xhat.plot()
plt.legend(["Observado","Predicción"])
plt.fill_between(xhat.index,confint["lower value"], confint["upper value"], alpha=0.2);
plt.title("Predicción endógena");
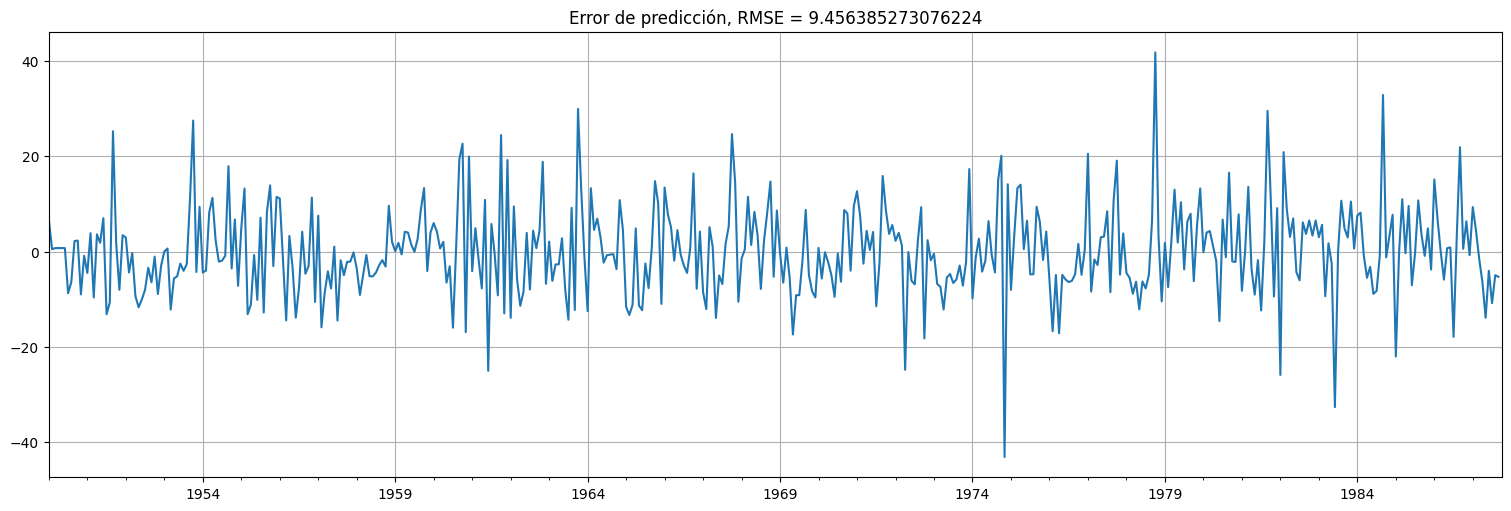
Podemos también ver el error de predicción, pero de hecho estos son exactamente los residuos del fit!
error = rec-xhat
error.plot()
plt.title(f"Error de predicción, RMSE = {np.std(error)}");
Ejercicios¶
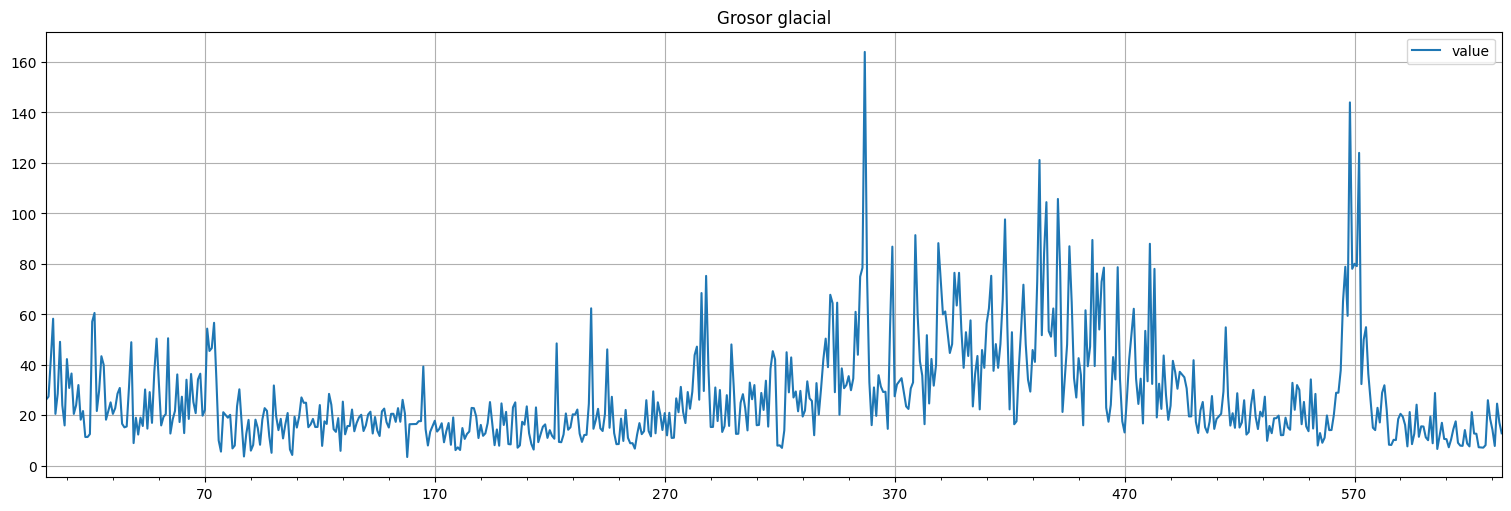
Análisis del grosor glacial.¶
Analizar la serie de grosor glacial del paquete astsa (serie varve). Aplicar la transformación diff(log(x)) para obtener una serie estacionaria y discutir el ajuste de un modelo \(MA(q)\) y \(ARMA(p,q)\).
varve=astsa.varve
varve.plot();
plt.title("Grosor glacial");